Transformers FME: 2025.0
Related Transformers
PointCloudComponentAdder
PointCloudComponentCopier
PointCloudExpressionEvaluator
PointOnRasterValueExtractor
RasterSelector
Définit les valeurs des composantes du nuage de points en superposant un nuage de points sur une trame. Les valeurs des composantes de chaque point sont interpolées à partir des valeurs de la bande à l'emplacement du point.
Cas d'utilisation courants
- Appliquer une couleur à un nuage de points
Comment fonctionne-t-il ?
PointCloudOnRasterComponentSetter reçoit deux jeux d'entités en entrée, PointCloud (nuage de points) et Raster, qui doivent être des mêmes système de coordonnées et unités.
Pour chaque point du nuage de points, les valeurs des composantes sont définies en extrayant les valeurs des bandes raster du même emplacement dans le raster sous-jacent. Ces valeurs sont interpolées si nécessaire, et une variété de méthodes d'interpolation est disponible. Les valeurs extraites sont ajoutées aux composantes du point comme spécifié - soit couleur (color_red, color_green, color_blue) ou un ensemble personnalisé de composantes, dans lequel vous pouvez sélectionner n'importe quelle composante standard du nuage de points pour recevoir les valeurs des cellules raster (y compris la couleur).
Les entités nuages de points ressortent avec de nouveaux jeux de valeurs de composants et les rasters sont supprimés.
Ce Transformer accepte plusieurs nuages de points et rasters en entrée. Un nuage de points est produit pour chaque nuage de points d'entrée.
Si plusieurs rasters sont utilisés, la valeur du composant sera prise dans le premier raster rencontré qui peut en fournir une, et donc l'ordre d'entrée des rasters peut affecter les résultats. Si un point ne recouvre pas un raster, le raster suivant sera essayé, et ainsi de suite jusqu'à ce qu'une valeur soit obtenue.
Les rasters doivent avoir le même nombre de bandes sélectionnées que de composants sélectionnés. Pour la couleur, trois bandes sont requises - rouge, vert et bleu. Un Transformer RasterSelector peut être utilisé pour remplir ces conditions - par exemple, un raster RGBA (couleur avec une bande alpha supplémentaire) ne doit avoir que ses trois premières bandes (RGB) sélectionnées pour être utilisé avec succès avec l'option Composants à définir - Couleur.
Ce Transformer supporte la sélection de bandes raster. Le RasterSelector peut être utilisé pour modifier cette sélection.
Exemples
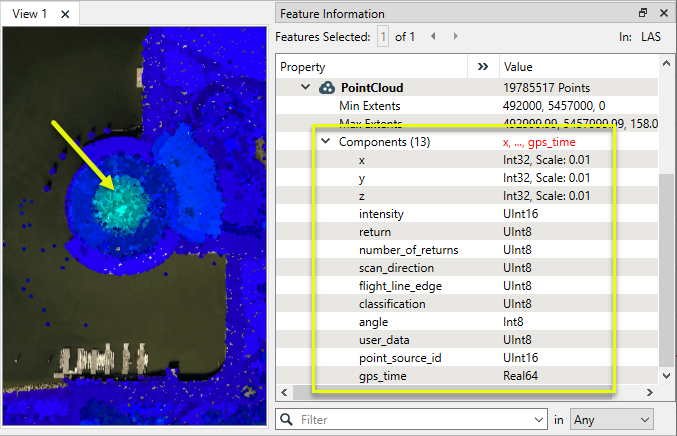
Dans cet exemple, nous allons appliquer la couleur à un nuage de points LiDAR en utilisant une orthoimage. Comme on peut le voir ici dans FME Data Inspector, le nuage de points recouvre partiellement l'orthoimage sous-jacente - la couverture du nuage de points se termine au niveau du littoral. Cette vue montre une vue aérienne (2D) des deux jeux de données, le nuage de points superposé au raster.
Notez que le nuage de points à plusieurs composants standards mais que cela n'inclut pas la couleur.
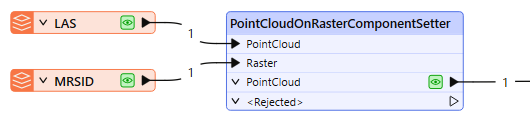
Les deux entités sont dirigées vers PointCloudOnRasterComponentSetter - le nuage de points (depuis le format LAS) vers le port d'entrée PointCloud, l'orthoimage (au format MrSID) vers le port d'entrée Raster.
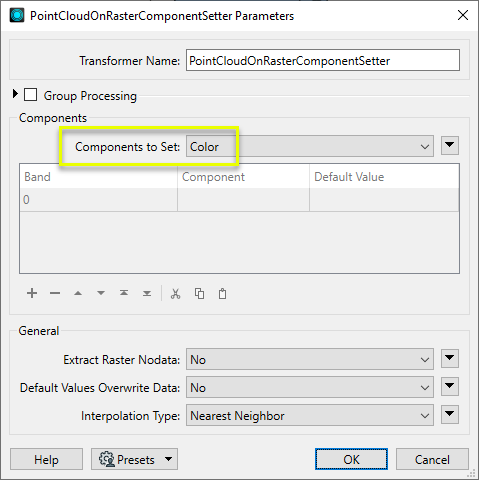
Dans la boîte de dialogue des paramètres, nous sélectionnons les Composants à définir comme Couleur. Les autres paramètres sont laissés avec leurs valeurs par défaut.
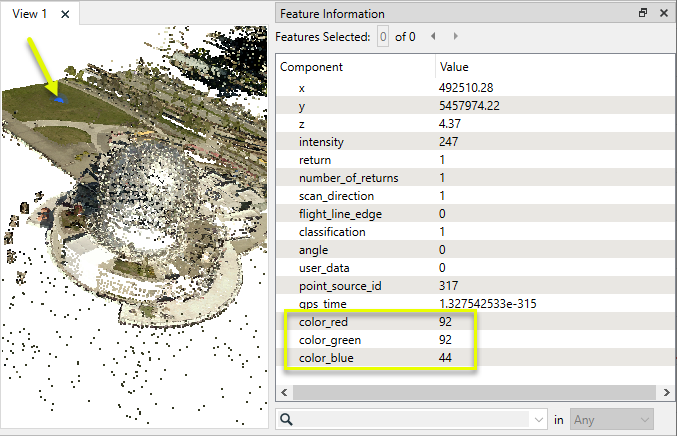
Le ,nuage de points généré possède maintenant des valeurs de couleur pour les composants color_red, color_green, and color_blue.
Notes
- PointCloudOnRasterComponentSetter peut être utile pour transférer des valeurs de données lors de la manipulation de types de données non nuages de points en tant que nuages de points afin d'améliorer le traitement.
Choisir un Transformer Nuages de points
FME possède une gamme de Transformers spécialisés dans le traitement de données nuages de points.
Pour plus d'informations sur les propriétés et géométrie des nuages de points, vois Nuages de points (IFMEPointCloud).
|
Combine les entités en un seul nuage de points. Les géométries de nuages de points et de nuages non ponctuels sont prises en charge. |
|
|
Ajoute de nouveaux composants de valeurs constantes à un nuage de points. |
|
|
Copie les valeurs des composants sélectionnés dans des composants soit nouveaux soit existants. |
|
|
Conserve seulement les composants nuages de points spécifiés, supprimant tous les autres. |
|
|
Supprime les composants spécifiés d'un nuage de points. |
|
|
Renomme un composant existant. |
|
|
Modifie le type de données de composants nuages de points et convertit les valeurs des composants si besoin est. |
|
|
Lit les entités du nuage de points à des fins de test, y compris toute opération accumulée sur le nuage de points. Aucune opération supplémentaire n'est effectuée, et rien n'est fait avec les entités. |
|
|
Crée un nuage de points selon une taille et une densité avec des valeurs de composants par défaut |
|
|
Calcule des expressions sur chaque point dans une entité nuage de points, comme des opérations algébriques et des déclarations conditionnelles, et définit les valeurs de chaque composant nuage de points. |
|
|
Sérialise la géométrie d'une entité raster dans un attribut Blob, encodant le contenu selon un choix de formats nuages de points binaires classiques. |
|
|
Sépare les nuages de points en plusieurs entités, en se basant sur l'évaluation d'expressions comprenant des valeurs de composants, et crée un port de sortie distinct pour chaque expression définie. |
|
|
Fusionne les nuages de points en joignant les points où les valeurs des composants sélectionnés correspondent (clé de jonction), y compris les composants x, y, z et autres. Les valeurs des composantes sont transférées entre les nuages de points et la sortie est filtrée en fonction de la réussite de la correspondance et de la duplication. |
|
|
Définit les valeurs des composantes du nuage de points en superposant un nuage de points sur une trame. Les valeurs des composantes de chaque point sont interpolées à partir des valeurs de la bande à l'emplacement du point. |
|
|
Extrait les propriétés géométriques d'une entité de nuage de points et les expose en tant qu'attributs, en vérifiant éventuellement leur existence, en récupérant les propriétés des composants et en trouvant les valeurs minimales et maximales. Les étendues peuvent également être recalculées et mises à jour. |
|
|
Décode un attribut binaire contenant des nuage de points encodés stockés en tant que blobs, puis remplace la géométrie de l’entité avec le nuage de point décodé. |
|
|
Réduit le nombre de points dans un nuage de points en conservant sélectivement les points en fonction de la forme du nuage de points. Les points simplifiés et supprimés sont produits comme deux nuages de points discrets. |
|
|
Tri les points d'un nuage de points en fonction des valeurs de ses composants |
|
|
Découpe un nuage de points en plusieurs entités, chacune ayant des valeurs homogènes pour les composants ayant servi de critère de découpage. |
|
|
Calcule des statistiques sur les composants des nuages de points et ajoute les résultats sous la forme d'attributs. |
|
|
Prend un nuage de points en entrée et le reconstruit dans une maille. |
|
|
Réduit le nombre de points dans (amincit) un nuage de points en conservant les points à un intervalle fixe, un nombre maximum de points, ou une quantité définie de premiers ou de derniers points. Les points restants sont éliminés. |
|
|
Convertit des nuages de points en points ou géométries multi-points, retenant optionnellement des valeurs d'attributs et composants. |
|
|
Applique une échelle, un décalage ou une transformation matricielle pour recalculer des valeurs de composants et supprimer des valeurs de transformation |
Configuration
Ports en entrée
Entités du nuage de points à superposer sur l'entrée Raster. Les entrées Raster et PointCloud doivent être dans le même système de coordonnées.
Raster(s) à partir desquels les valeurs seront extraites. Les entrées Raster et PointCloud doivent être dans le même système de coordonnées.
Ports de sortie
Entités nuages de points avec des valeurs de composants mises à jour.
Les entités non nuages de points sont dirigées vers le port <Rejected>, de même que les nuages de points invalides.
Les entités rejetés auront un attribut fme_rejection_code avec l'une des valeurs suivantes :
INVALID_GEOMETRY_TYPE
INVALID_FEATURE_COMPONENTS
Gestion des entités rejetées : ce paramètre permet d'interrompre la traduction ou de la poursuivre lorsqu'elle rencontre une entité rejetée. Ce paramètre est disponible à la fois comme option par défaut de FME et comme paramètre de traitement.
Paramètres
|
Regrouper par |
Si des attributs de regroupement sont sélectionnés, les entités avec les mêmes valeurs pour les attributs de regroupement seront regroupées et les rasters seront utilisés uniquement pour définir les valeurs des composants des nuages de points du même groupe. |
||||
|
Traitement des regroupements |
Sélectionnez le moment du traitement où les groupes sont traités :
Il y a deux raisons typiques d'utiliser Quand le groupe change (avancé). La première concerne les données entrantes qui sont destinées à être traitées en groupes (et qui sont déjà classées ainsi). Dans ce cas, c'est la structure qui dicte l'utilisation de Regrouper par - et non des considérations de performance. La seconde raison possible est le potentiel gain de performances. Les gains de performance sont plus visibles quand les données sont déjà triées (ou lues en utilisant une déclaration SQL ORDER BY) puisque moins de travail est requis de la part de FME. Si les données doivent être ordonnées, elles peuvent être triées dans le traitement (bien que la surcharge de traitement supplémentaire puisse annuler tout gain). Le tri devient plus difficile en fonction du nombre de flux de données. Il peut être quasiment impossible de trier des flux de données multiples dans l'ordre correct, car toutes les entités correspondant à une valeur Regrouper par doivent arriver avant toute entité (de tout type d'entité ou jeu de données) appartenant au groupe suivant. Dans ce cas, l'utilisation de Regrouper par avec Lorsque toutes les entités sont reçues peut être une approche équivalente et plus simple. Note De multiples types d'entités et entités de multiples jeux de données ne vont généralement pas arriver dans l'ordre correct.
Comme pour beaucoup de scénarios, tester différentes approches dans votre traitement avec vos données est le seul moyen sûr d'identifier le gain de performance. |
|
Composants à définir |
Spécifie quels composants du nuage de points doivent être définis par les rasters correspondants.
|
||||||
|
Table de composants |
Si Composants à définir vaut Personnalisée, sélectionner les composants :
|
|
Extraire les cellules sans valeur |
Spécifie le comportant quand un point repose sur une valeur raster nodata.
|
||||||||||
|
Les valeurs par défaut écrasent les données |
Spécifie le comportement quand aucune valeur ne peut être trouvée pour un point depuis n'importe quel raster, mais le composant existe déjà dans le nuage de points en entrée.
|
||||||||||
|
Méthode d'interpolation |
Les valeurs des cellules sont interpolées pour obtenir les valeurs des composants du nuage de points. Sélectionnez une méthode d'interpolation pour déterminer les valeurs :
|
Éditer les paramètres des Transformers
Les paramètres du Transformer peuvent être définis en saisissant directement des valeurs, en utilisant des expressions ou en faisant référence à d'autres éléments de l'espace de travail tels que des valeurs d'attributs ou des paramètres utilisateur. Divers éditeurs et menus contextuels sont disponibles pour vous aider. Pour voir ce qui est disponible, cliquez sur  à côté du paramètre concerné.
à côté du paramètre concerné.
Définir les valeurs
Il existe plusieurs façons de définir une valeur à utiliser dans un Transformer. La plus simple consiste à saisir simplement une valeur ou une chaîne de caractères, qui peut inclure des fonctions de différents types telles que des références d'attributs, des fonctions mathématiques et de chaînes de caractères, et des paramètres traitement.
Utilisation de l'éditeur de texte
L'éditeur de texte fournit un moyen efficace de construire des chaînes de textes (dont les expressions régulières) à partir de données source diverses, telles que des attributs, des paramètres et des constantes, et le résultat est directement utilisé dans le paramètre.
Utilisation de l'éditeur arithmétique
L'éditeur arithmétique fournit un moyen simple de construire des expressions mathématiques à partir de plusieurs données source, telles que des attributs et des fonctions, et le résultat est directement utilisé dans un paramètre.
Valeur conditionnelle
Définit des valeurs selon un ou plusieurs tests.
Fenêtre de définition de conditions
Contenu
Les expressions et chaînes de caractères peuvent inclure des fonctions, caractères, paramètres et plus.
Lors du paramétrage des valeurs - qu'elles soient entrées directement dans un paramètre ou construites en utilisant l'un des éditeurs - les chaînes de caractères et les expressions contenant des fonctions Chaîne de caractères, Math, Date et heure ou Entité FME auront ces fonctions évaluées. Par conséquent, les noms de ces fonctions (sous la forme @<nom_de_fonction>) ne doivent pas être utilisés comme valeurs littérales de chaîne de caractères.
| Ces fonctions manipulent les chaînes de caractères. | |
|
Caractères spéciaux |
Un ensemble de caractères de contrôle est disponible dans l'éditeur de texte. |
| Plusieurs fonctions sont disponibles dans les deux éditeurs. | |
| Fonctions Date/heure | Les fonctions de dates et heures sont disponibles dans l'Editeur texte. |
| Ces opérateur sont disponibles dans l'éditeur arithmétique. | |
| Elles retournent des valeurs spécifiques aux entités. | |
| Les paramètres FME et spécifiques au traitement peuvent être utilisés. | |
| Créer et modifier un paramètre publié | Créer ses propres paramètres éditables. |
Outils de tableau
Les Transformers avec des paramètres de style table possèdent des outils additionnels pour remplir et manipuler des valeurs.
|
Réordonner
|
Activé une fois que vous avez cliqué sur un élément de ligne. Les choix comprennent :
|
|
Couper, Copier et Coller
|
Activé une fois que vous avez cliqué sur un élément de ligne. Les choix comprennent :
Copier, copier et coller peuvent être utilisés au sein d'un Transformer ou entre Transfromers. |
|
Filtre
|
Commencez à taper une chaîne de caractères, et la matrice n'affichera que les lignes correspondant à ces caractères. Recherche dans toutes les colonnes. Cela n'affecte que l'affichage des attributs dans le Transformer - cela ne change pas les attributs qui sont sortis. |
|
Importer
|
Le bouton d'import remplit la table avec un jeu de nouveaux attributs lus depuis un jeu de données. L'application spécifique varie selon les Transformers. |
|
Réinitialiser/Rafraîchir
|
Réinitialise la table à son état initial, et peut fournir des options additionnelles pour supprimer des entrées invalides. Le comportement varie d'un Transformer à l'autre. |





Note : Tous les outils ne sont pas disponibles dans tous les Transformers.
Pour plus d'information, consulter la section Options des Transformers.
Références
|
Comportement |
|
|
Stockage des entités |
Oui |
| Dépendances | Aucun |
| Alias | PointCloudOnRasterValueExtractor |
| Historique |
FME Community
FME Community dispose d'une mine de connaissances sur FME, avec plus de 20 000 membres actifs dans le monde entier. Obtenez de l'aide sur FME, partagez vos connaissances et entrez en contact avec des utilisateurs du monde entier.
Voir tous les résultats à propos de ce Transformer sur FME Community.
Examples may contain information licensed under the Open Government Licence – Vancouver, Open Government Licence - British Columbia, and/or Open Government Licence – Canada.